Most existing haptic gloves are complicated user interfaces with remotely located actuators. More compact and simpler haptic gloves would greatly increase our ability to interact with virtual worlds in a more natural way.
This research explored the design of a compact force feedback glove using a new finger mechanism and magnetorheological (MR) brakes as passive actuators that oppose human finger motion. The glove reduced task completion time by 61% and could support up to 17 N fingertip force along with 11.9 N and 18.7 N middle and proximal digit forces.
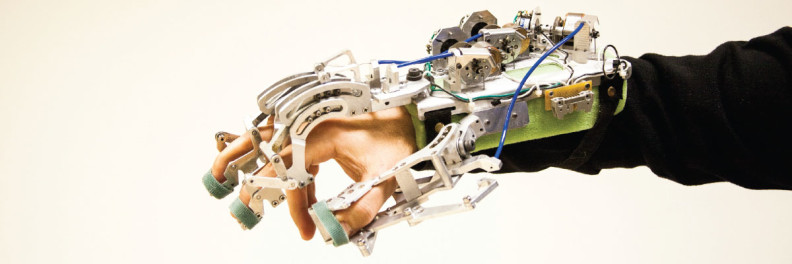
Finger mechanism consists of two consecutive four-bar linkages. The mechanism allowed reduction of number of actuators and application of distributed forces at the bottom surface of user’s fingers when an object was grasped in a virtual environment.
Publications
- “Haptic Glove with MR-brakes for distributed finger Force Feedback,” Presence, MIT Press , vol. 18, no. 6, December 2009.
- “Haptic gloves with compact finger mechanism using active and passive actuation,” Proceedings of the ASME 2009 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2009 , San Diego, CA, 2009 .
- “Finger mechanism of a haptic glove for force feedback in virtual environments,” Proceedings of the ASME International Mechanical Engineering Congress and Exposition , November, Seattle, WA, 2007.