Fuel cells in vehicular power systems
This project involves the use of a fuel cell—based power unit that supplies partial loads of a vehicle. So far the focus was on a DC hybrid power system with a fuel cell and a battery as the main power sources. The attempt was the design of the controllers and the energy management system to properly control the fuel cell power and the load voltage. A prototype was set up using a TMS320F28335 DSC to control a 4kW power unit. Currently, the project is focused on the integration of the designed fuel cell—based power unit to the main vehicular power system. The attempt is to design the energy management system and the controllers for smooth transition between inverter-fed and electric generator-fed modes. This project is being set up in a hardware-in-the-loop simulation: a Real Time Digital Simulator (RTDS) simulates the whole vehicular power system and an external hardware (an NI cRIO) monitors the system and sends command signals to the controllers.
- Participants: Saleh Ziaeinejad, Younes Sangsefidi, Zahra Mahmoodzadeh.
- Sponsor: XX
Power electronic converters for integration of wind units to the power system
This project deals with the control of modular multilevel converters (MMCs) for integration of wind power units to the power systems. The focus is on the configuration and control of the converters to improve the transient and steady-state performance of the system with reduced torque ripples on the generator side and improved power quality on the grid side. This project will be set up using OPAL-RT modules.
- Participants: Saleh Ziaeinejad.
- Sponsor: XX
Design and implementation of control strategy to enhance the reference tracking of DER units
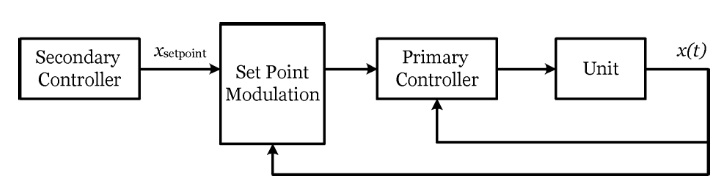
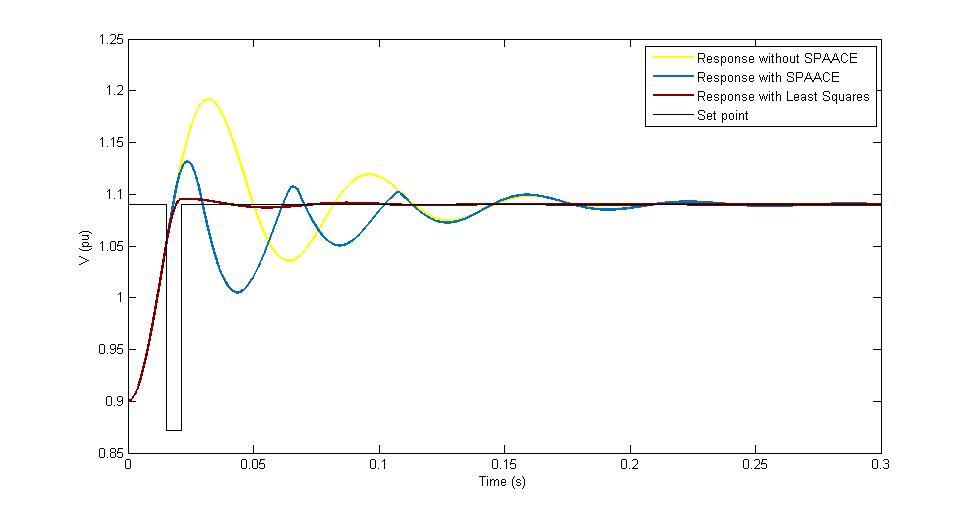
In this project, a strategy for set point control of power systems with the aim of improving the performance of DER units is studied. Set point automatic adjustment with correction enabled (SPAACE), monitors the trend and the real-time values of the response of the system and by comparing them with a predetermined limits, decides how to temporarily change the set point of the system to achieve a response with a smaller overshoot/undershoot and a shorter settling time. To improve the performance of SPAACE, two different prediction algorithms are applied. In these prediction algorithms, the control unit, using the instantaneous and previous values of the measurement signal, attempts to predict the future value of output signal. Then SPAACE utilizes this value and changes the set point of the system when a transition occurred.
- Participants: Hooman Ghaffarzadeh, Christopher Stone.
- Sponsor: XX
Direct torque control of synchronous motors
In this project, a synchronous motor was controlled using direct torque control (DTC) algorithm. The focus was on the control schemes that can facilitate the use of two-phase synchronous motors in variable-speed household applications. By analyzing the effect of the stator resistance variations on the performance of the motor drive, a novel stator resistance estimator was proposed for online tracking of the stator resistance of synchronous motors. This project was set up using a TMS320F2812 DSP and a 2kW synchronous motor.
- Participants: Younes Sangsefidi, Saleh Ziaeinejad.
- Sponsor: XX