Projects

Optimization-Free Control of Constrained Systems
Goal: The primary objective is to develop innovative, optimization-free frameworks that guarantee the safety and high performance of safety-critical systems, eliminating the dependence on online optimization.

Inexact Optimization Techniques for the Deployment of Safety-Critical Optimization-Based Control
Goal: The primary objective of this project is to develop inexact optimization techniques that enable the safe and stable deployment of optimization-based control frameworks (e.g., model predictive control) in safety-critical systems operating under strict computational constraints and dynamic environments. In particular, the project aims to enable reliable control decisions to be computed with limited computational resources.
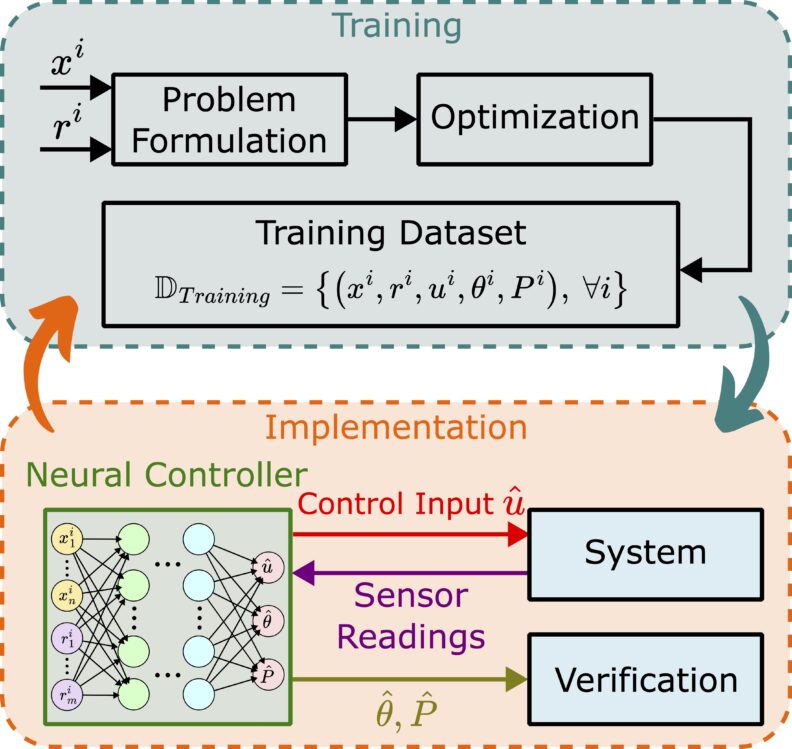
Provably-Safe Neural Controller for Nonlinear Systems
Goal: The primary objective is to develop neural controllers that replicate the behavior of optimal controllers for nonlinear systems, while ensuring rigorous guarantees for safety, stability, and high performance.
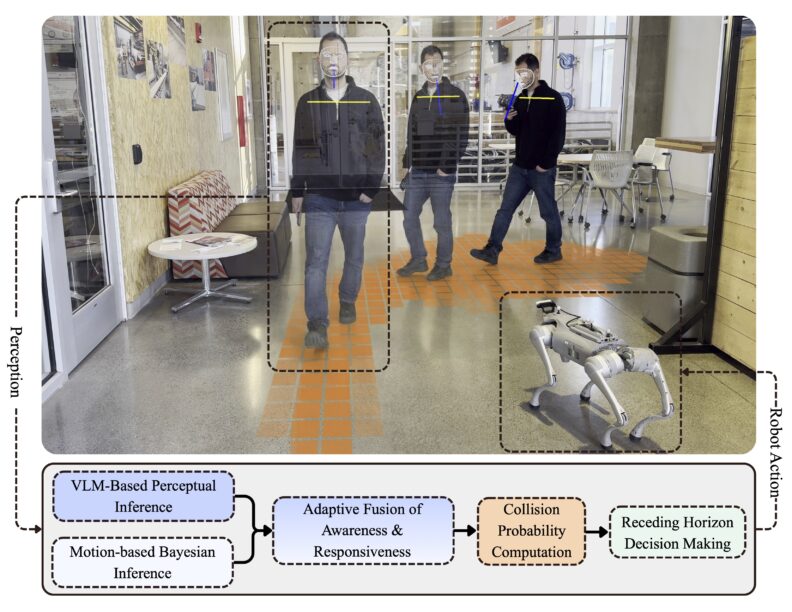
Behavior-Aware Human-Robot Interaction
Goal: The primary objective of this project is to understand, model, and integrate human behavioral factors into robot action planning to improve the safety and efficiency of human-robot interaction. The project develops behavior-aware decision-making frameworks that enable robots to anticipate human intent, awareness, responsiveness, and cooperation, adapt their actions accordingly, and ensure safe and natural interaction in dynamic environments.
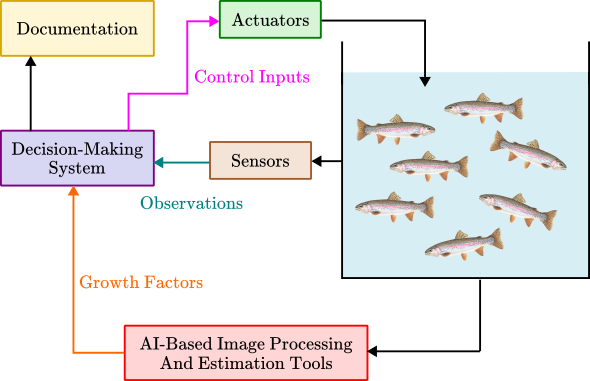
AI-Driven Farm Optimization for Enhancing Aquaculture Production Efficiency
Goal: The primary objective is to develop control-theoretic and AI-driven approaches to enhance aquaculture farm production and improve the resilience of cultured fish.