Soft Robotics Learning Modules
Soft robotics and compliant robotic mechanisms have become increasingly popular in the past decade. Their soft, compliant nature makes them safe for interaction with humans and ideal for applications that require adaptability, such as in squeezing through tight spaces or grasping objects.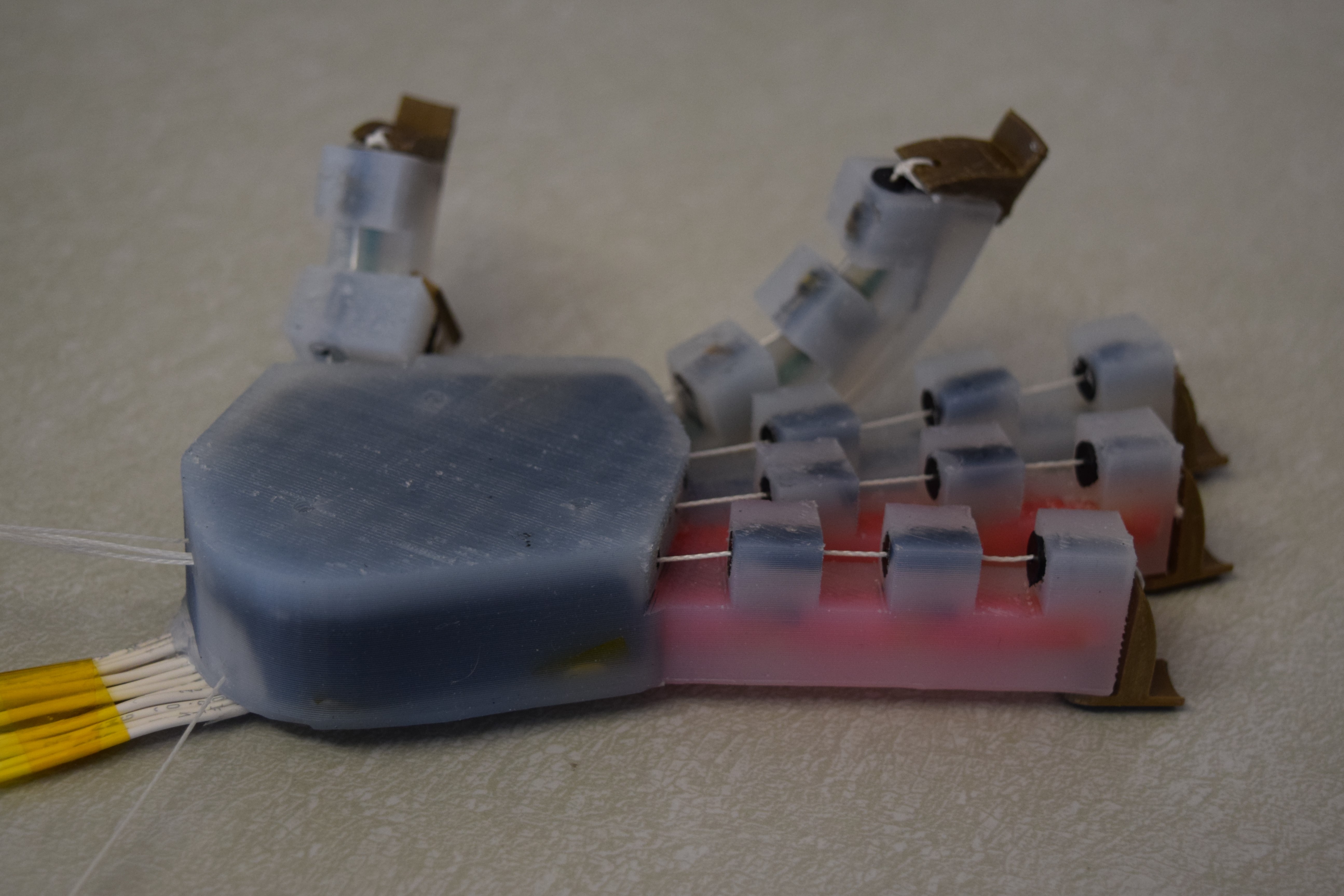
To encourage progress and creativity in this field, lab members Emily Allen and Lee Taylor are working to develop learning modules that introduce high school students to the potential capabilities of soft robotics and the engineering principles that support their design.
A soft robotic hand featuring multiple smart materials has been developed to demonstrate concepts of design, fabrication, and actuation to students of all ages. The hand utilizes tendon-driven actuation for finger flexion with shape memory alloy (SMA) actuated extension.

This learning module includes detailed instructions for fabricating parts and assembling the hand as well explanations of basic engineering principles that govern its design. This project is funded by NSF grant 11V-3825-5501. Click the link below to access Soft robotic hand learning module:
Soft Robotic Hand Learning Module