Welcome to the M3 Robotics Lab
Compliance is an intrinsic aspect of nearly all biological systems. However, until recently, traditional robotics has focused more on rigid structures with discrete numbers of links and actuators (whether in series or parallel). More recently, soft robotics has become a popular area of research as it provides a level of safety for human/robot interaction that rigid systems cannot provide. However, there are many situations where robotic systems need the ability to switch between being highly compliant and offering rigidity as they interact with their environment (including human operators). In the effort to develop tunably compliant mechanisms and robotics systems, the M3 Robotics Lab is focused on:
- High degrees of *: Estimation and control for systems where there are high degrees of freedom, high degrees of actuation or underactuation, and/or high degrees of sensor information.
- Tunably compliant mechanism: Using smart materials to actively control mechanism compliance, often coupled with traditional robotic actuation schemes.
- Applications in medical robotics: The goal of many medical devices is to deftly navigate to a location within the body and then interact with tissues at the target location. Travel to the treatment site requires dexterity and compliance, while interactions at the target site require higher levels of rigidity. Medical robotics provides an ideal testbed for validating the previous two principles.
We take an approach of design, model, estimation, and control, where we focus on both analytical and theoretical understanding as well as experimental validation and demonstration. While the primary focus of the research in high degree of freedom systems with tunable compliance is in the area of medical robotics and biomedical systems, these same principles have the potential for employ in manufacturing scenarios, space robotics, and home robotics.
The M3 Robotics Lab is directed by Prof. John Swensen, and is part of a growing group of robotics researchers and students at Washington State University.
-
Emily Allen successfully defends her PhD disseration!
Today Emily Allen successfully defended her PhD dissertation on DESIGN AND MODELING OF A PNEU-SMA SOFT ROBOTIC CATHETER DEVICE USING RESISTANCE-BASED MODELING OF NITINOL SPRINGS.
Congratulations, Dr. Allen!
Read Story -
Fan’s Paper on Predictive Model for Stylet-and-Tube Steerable Needles is Accepted for a Presentation at IROS 2020
Fan’s Paper entitled “Resultant Radius of Curvature of Stylet-and-Tube Steerable Needles” is accepted for an oral presentation at International Conference on Intelligent Robots and Systems (IROS) 2020.
The abstract of this paper is as follows:
Steerable needles have been widely researched in recent years, and they have multiple potential roles in the medical area.
The flexibility and capability of avoiding obstacles allow the steerable needles to be applied in the biopsy, drug delivery and other medical applications that require a high degree of freedom and control accuracy.
Radius of … » More …
Read Story -
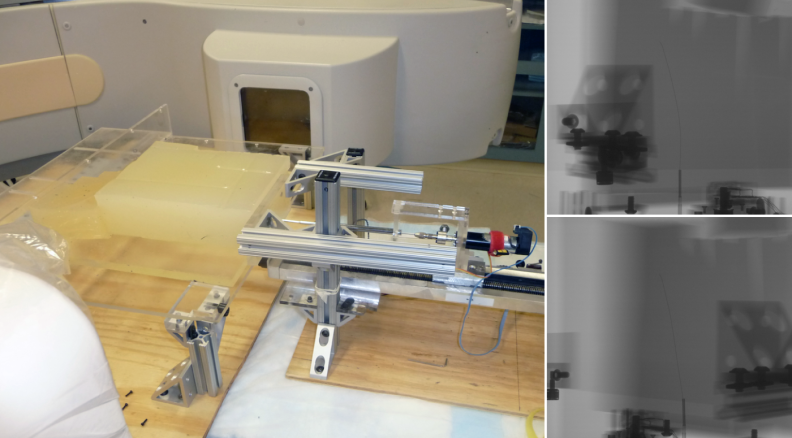
Mahdieh and Fan Defended Their Theses on Fracture-directed Steerable Needles
On Wednesday July 22nd, Mahdieh Babaiasl has successfully defended her PhD thesis entitled “Waterjet Fracture-directed Steerable Needles“.
The abstract of the thesis as follows:
Robotic needle steering is a proposed method in the literature for controlling long flexible needles through curved paths in the soft tissue. Needle steering is proven to be effective in correction … » More …
Read Story -
Fracture-directed Waterjet Needle Steering: Design, Modeling, and Path Planning Accepted for Proceedings of BioRob 2020
Our paper on fracture-directed waterjet needle steering is accepted to be presented at BioRob 2020 and also to be published in IEEE.
The contributors of this paper are Mahdieh Babaiasl, Stefano Bocelli, and Fan Yang under the supervision of Dr. John Swensen.
The abstract of this paper is:
Steerable needle technology has the promise of improving outcomes by enhancing the accuracy of different therapies and … » More …
Read Story -
Duty Cycling of Waterjet Can Improve Steerability and Radius-of-Curvature (ROC) for Waterjet Steerable Needles Accepted for Proceedings of ISMR 2020
Our paper on curvature control of waterjet steerable needles is accepted to be presented at ISMR 2020 and also to be published in IEEE.
The contributors of this paper are Mahdieh Babaiasl, and Fan Yang under the supervision of Dr. John Swensen.
The abstract of this paper is:
Steerable needles are a type of medical devices that can steer around obstacles … » More …
Read Story -
Measuring the Insertion Forces of the Waterjet Needle System
Our paper entitled “Towards Waterjet Steerable Needles” that was presented at BioRob 2018 measured the waterjet needle’s insertion forces and compared them with a traditional needle with no waterjet running through. It is shown that incorporating waterjet reduces the insertion force and thus buckling of the needle.
The contributors for this project are Mahdieh Babaiasl, and Fan Yang under the supervision of Dr. John P. Swensen.
Abstract of the Paper Towards Waterjet Steerable Needles
Water-jet technology has been used extensively for decades industrially for many applications including mining, plastic, … » More …
Read Story -
Fracture-Directed Steerable Needles
Our paper entitled “Fracture-Directed Steerable Needles” is published in the Journal of Medical Robotics Research.
The authors of this manuscript are Fan Yang, Mahdieh Babaiasl, and John Swensen.
Abstract
Steerable needles hold the promise of improving the accuracy of both therapies and biopsies as they are able to steer to a target location around obstructions, correct for disturbances, and account for movement of internal organs. However, their ability to make late-insertion corrections has always been … » More …
Read Story -
Our New Paper Entitled “Predictive mechanics-based model for depth of cut (DOC) of waterjet in soft tissue for waterjet-assisted medical applications” Is Now Online
Our new paper entitled “Predictive mechanics-based model for depth-of-cut (DOC) of waterjet in soft tissue for waterjet-assisted medical applications” is recently accepted to be published in Medical & Biological Engineering & Computing journal and is now online at the following address: Click HERE!
This paper solves the fundamental physics problem of the interaction of the waterjet with the surrounding soft tissue for waterjet-assisted cutting in medical and surgical applications.
Mahdieh Babaiasl, Stefano Bocelli, Yao Chen, and Fan Yang conducted this research under the supervision of Dr. … » More …
Read Story -
Waterjet Steerable Needles’ Abstract Published in WSU’s Website
Our abstract entitled “WATERJET STEERABLE NEEDLES: A NEW PROMISE FOR IMPROVING MEDICAL PROCEDURES” about waterjet steerable needles is accepted for WSU’s this year Academic Showcase but the actual event is not held because of the outbreak of the COVID-19.
Mahdieh Babaiasl, and Fan Yang are presenters of this abstract under the supervision of Dr. John Swensen.
Abstract
Steerable needles are a type of medical devices that can steer around obstacles to reach to a target location within patient anatomy and thus can improve the accuracy of medical procedures. Radius … » More …
Read Story -
Outreach event hosted by M3 robotics Robotics Lab
An outreach event arranged by The Graduate and Professional Student Association (GPSA) is hosted by M3 robotics Lab on March 2020.
In this event, kids are become familiarized with research going on in our lab such as steerable needles, soft robotics and Shape Memory Alloys (SMAs). They had the chance to do their own experiment with a worm made of Shape Memory Alloy.
M3 robotics lab is directed by Prof. John P. Swensen, and graduate students Mahdieh Babaiasl, Fan Yang, Emily … » More …
Read Story