Mahdieh Babaiasl was an invited Speaker for MME Seminar Series on Nov. 1, 2019. She gave a talk on Waterjet-assisted Needle Steering.
Waterjet-assisted Needle Steering to be Used for Medical Applications
Steerable needle technology has the promise of improving outcomes by enhancing the accuracy of different 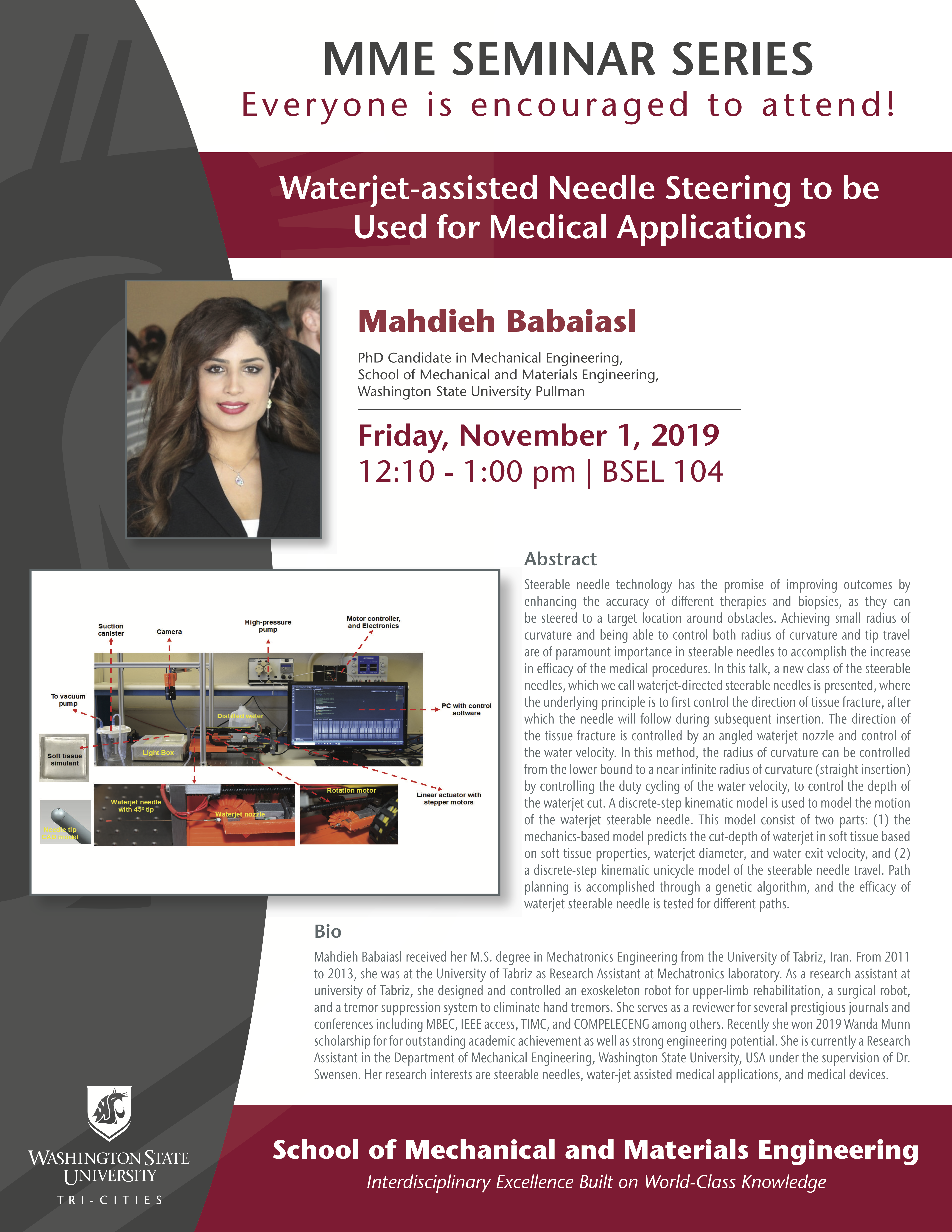 therapies and biopsies, as they can be steered to a target location around obstacles.
therapies and biopsies, as they can be steered to a target location around obstacles.
Achieving small radius of curvature and being able to control both radius of curvature and tip travel are of paramount importance in steerable needles to accomplish the increase in efficacy of the medical procedures.
In this talk, a new class of the steerable needles, which we call waterjet-directed steerable needles is presented, where the underlying principle is to first control the direction of tissue fracture, after which the needle will follow during subsequent insertion. The direction of the tissue fracture is controlled by an angled waterjet nozzle and control of the water velocity.
In this method, the radius of curvature can be controlled from the lower bound to a near infinite radius of curvature (straight insertion) by controlling the duty cycling of the water velocity, to control the depth of the waterjet cut.
A discrete-step kinematic model is used to model the motion of the waterjet steerable needle. This model consist of two parts: (1) the mechanics-based model predicts the cut-depth of waterjet in soft tissue based on soft tissue properties, waterjet diameter, and water exit velocity, and (2) a discrete-step kinematic unicycle model of the steerable needle travel.
Path planning is accomplished through a genetic algorithm, and the efficacy of waterjet steerable needle is tested for different paths.
Mahdieh Babaiasl received her M.S. degree in Mechatronics Engineering from the University of Tabriz, Iran. From 2011 to 2013, she was at the University of Tabriz as Research Assistant at Mechatronics laboratory.
As a research assistant at university of Tabriz, she designed and controlled an exoskeleton robot for upper-limb rehabilitation, a surgical robot, and a tremor suppression system to eliminate hand tremors.
She serves as a reviewer for several prestigious journals and conferences including MBEC, IEEE access, TIMC, and COMPELECENG among others.
Recently she won 2019 Wanda Munn scholarship for for outstanding academic achievement as well as strong engineering potential.
She is currently a Research Assistant in the Department of Mechanical Engineering, Washington State University, USA under the supervision of Dr. Swensen.
Her research interests are steerable needles, water-jet assisted medical applications, and medical devices.
Excerpts from the talk: