Marine Vehicles
Our group specializes in R&D on advanced marine vehicles (AMV), including air-cavity hulls, aerodynamically supported marine craft, hydrofoils, multi-hulls, small waterplane area ships, etc. We also started developing smart underwater and semi-submersible vehicles. We carry out preliminary design, CFD, sub-scale prototype construction, and testing of self-propelled models in open water reservoirs. We often collaborate with companies on practical AMV development. Some of our projects are illustrated below.
1. Air cavity ships (ACS)
One of the promising methods for reducing drag of marine vessels is based on air lubrication of the ship hull bottom. The main idea is to supply air into a special recess on the hull surface to generate thin, large-area air cavities that separate a significant fraction of the wetted hull surface from the contact with water at small air supply rates. This results in a substantial frictional drag reduction. Examples of possible implementations of air-ventilated cavities on displacement and planing hulls are shown below. Multiple air cavities can be accommodated on long displacement hulls (left figure), and a single-wave cavity can be arranged on a bottom of a fast planing hull (right figure).

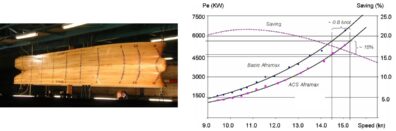
Dr. Matveev has been intensely involved in studies on air-ventilated flows and various types of ACS. He conducted experiments and modeling on the air-cavity phenomena, including development of demonstrators of full-scale drag-reducing systems employing artificial cavitation. An example of experimental towing-tank results showing drag reduction obtained on a tanker model is shown below. 18% drag reduction is deemed to be achievable with this system at the cruising speed of 14.5 knots in calm-water conditions.
At WSU we built and tested remotely controlled testing platform with an air-cavity hull. A modular structure allows us to test various system setups. It is instrumented with sensors to measure speed, attitude, thrust force, cavity pressure and length, and supplied airflow rate. A video camera on top captures multiphase flow phenomena through transparent bottom.

CFD movie of air cavity dynamics on a fast barge-type (landing) boat in waves:
2. Aerodynamically supported marine craft
Aerodynamic support is beneficial for economically achieving very high speeds of marine transportation. Wing-in-ground (WIG) vehicles, power-augmented-ram (PAR) platforms, and ultra-fast planing multi-hulls are examples of marine craft with air assistance.
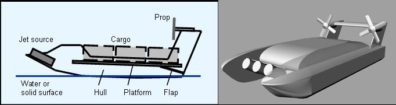
We developed math models and built and tested prototype power-augmented-ram vehicles (PARV) with amphibious capabilities. These are high-speed (>100 knots at full scales), compact vehicles with simple structure. They can carry heavy payloads with high weight efficiency (payload-to-weight ratio about 50%) at reasonably low power (thrust-to-weight ratio below 20%). PARV can operate on the water, ice, snow, mud, and relatively flat rigid surfaces. This is an excellent solution for advanced high-speed landing operations and patrol, rescue, and other missions, where amphibious capabilities are required.
We have also built and tested more traditional WIG craft on both water and solid surfaces (including Martin stadium in Pullman).

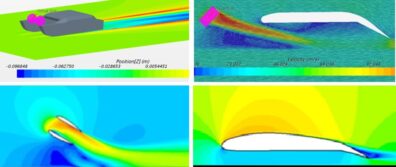
With modern CFD tools, complex propulsor-wing-ground interactions can be modeled with high fidelity:
3. Hydrofoil boats
Hydrofoils are essentially underwater wings that generate significant lift at low drag when moving through water. Hydrofoil systems can be applied for lifting ship hulls out of water, thus drastically reducing water resistance. The maximum economical speed is limited by cavitation when air/vapor bubbles or cavities appear on suction surfaces of foils.
Dr. Matveev has developed simulation methods for hydrodynamics and dynamics of hydrofoil boats, including modeling of complex foil systems, stability analysis, and motions in waves. He also studied vortex-induced vibrations (associated with hydrofoil singing) on foil systems made of titanium alloys on Olympia-class fast ferry (shown below). Dr. Matveev’s father (Ivan Ivanovich Matveev) was the chief designer of this ship.

We built ultra-fast small-scale hydrofoils that can operate either under remote control or autonomously:
We also developed high-fidelity CFD simulations for smart composite hydrofoils with orthotropic properties:
Trick questions: Who designed a hydrofoil system for a strange vehicle in the first xXx movie (left figure below) and who is riding on top of it (right figure)?
(Hint: it should be either Dr. Matveev or Vin Diesel.)

4. Small waterplane area ships (SWAS)
Small waterplane area ships are characterized by superior seaworthiness and low wave drag. Dr. Matveev has studied SWAS hydrodynamics and co-authored a technical handbook on this technology.
Dubrovsky, K. Matveev, S. Sutulo
Backbone Publishing, Fair Lawn, NJ.
ISBN-13: 978-09742019-3-1
255 pages, 7.5″x10″, 2007.
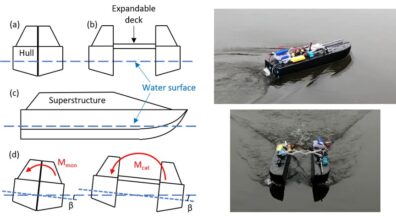
5. Transformable boats
Practically all marine vessels have fixed-geometry hulls. Having a transformable or adaptive hull structure can help maximize ship’s operational performance for various scenarios. A catamaran is desirable for carrying volumetric cargo or creating a large deck space that can serve, for example, as a launch pad for aircraft, while more compact monohulls can be more easily stored or operated in restricted environments. A monohull and a catamaran also have different stability, hydrodynamic, maneuvering and seakeeping characteristics. We have constructed and tested a model boat with two hulls that can be brought together or separated using an expansion mechanism.
6. Autonomous underwater vehicles
We started developing autonomous underwater craft that utilize machine learning and artificial intelligence to identify, approach, and effect underwater objects:
7. Semi-submersible vehicle
Semi-submersible craft have low visibility and low drag in some operational regimes. They can benefit navies and transportation companies. We have built and tested a prototype semi-sub:
8. Semi-displacement boats
We also develop and test more conventional marine vehicles, such as fast semi-displacement boats. They are built using composite materials and 3D-printing. We instrument boats with propulsion, control, communication, sensing and other sub-systems.