Mahdieh Babaiasl was an invited Speaker for MME Seminar Series on Nov. 1, 2019. She gave a talk on Waterjet-assisted Needle Steering.
Waterjet-assisted Needle Steering to be Used for Medical Applications
Steerable needle technology has the promise of improving outcomes by enhancing the accuracy of different therapies and biopsies, as they can be steered to a target location around obstacles.
Achieving small radius of curvature and being able to control both radius of curvature and tip travel are of paramount importance in steerable needles to accomplish the increase in efficacy of the medical procedures.
In this talk, a new class of the steerable needles, which we call waterjet-directed steerable needles is presented, where the underlying principle is to first control the direction of tissue fracture, after which the needle will follow during subsequent insertion. The direction of the tissue fracture is controlled by an angled waterjet nozzle and control of the water velocity.
In this method, the radius of curvature can be controlled from the lower bound to a near infinite radius of curvature (straight insertion) by controlling the duty cycling of the water velocity, to control the depth of the waterjet cut.
A discrete-step kinematic model is used to model the motion of the waterjet steerable needle. This model consist of two parts: (1) the mechanics-based model predicts the cut-depth of waterjet in soft tissue based on soft tissue properties, waterjet diameter, and water exit velocity, and (2) a discrete-step kinematic unicycle model of the steerable needle travel.
Path planning is accomplished through a genetic algorithm, and the efficacy of waterjet steerable needle is tested for different paths.
Mahdieh Babaiasl received her M.S. degree in Mechatronics Engineering from the University of Tabriz, Iran. From 2011 to 2013, she was at the University of Tabriz as Research Assistant at Mechatronics laboratory.
As a research assistant at university of Tabriz, she designed and controlled an exoskeleton robot for upper-limb rehabilitation, a surgical robot, and a tremor suppression system to eliminate hand tremors.
She serves as a reviewer for several prestigious journals and conferences including MBEC, IEEE access, TIMC, and COMPELECENG among others.
Recently she won 2019 Wanda Munn scholarship for for outstanding academic achievement as well as strong engineering potential.
She is currently a Research Assistant in the Department of Mechanical Engineering, Washington State University, USA under the supervision of Dr. Swensen.
Her research interests are steerable needles, water-jet assisted medical applications, and medical devices.
Fracture-directed Steerable needles is a new class of steerable needles that is first introduced by Dr. John P. Swensen, in which the direction of the tissue fracture is controlled by high velocity waterjet and then the flexible needle made of Nitinol follows. This process continues until the needle reaches to the desired place in the soft tissue.
The direction of the tissue fracture is controlled by the angled nozzle, and different bendings are also possible by rotating the nozzle inside the tissue. We are now at a place that proved that this technique is working.
Current research is on improving the nozzle of the waterjet, and controlling the steerable needle. Graduate Students Mahdieh Babaiasl and Fan Yang are contributing to this project.
M3 robotics lab participated in annual 2019 Research Expo held by Washington State University. At this Expo Researchers present their research to the general public and researchers from different disciplines.
Lee and Oscar presented their research on “Real-time extraction of helicopter analog gauge data using deep neural networks”.
Lee and Oscar are presenting their research at WSU showcase 2019.
Mahdieh Babaiasl presented her research on Waterjet Steerable Needles.
Mahdieh Babaiasl is presenting her research on waterjet steerable needles.
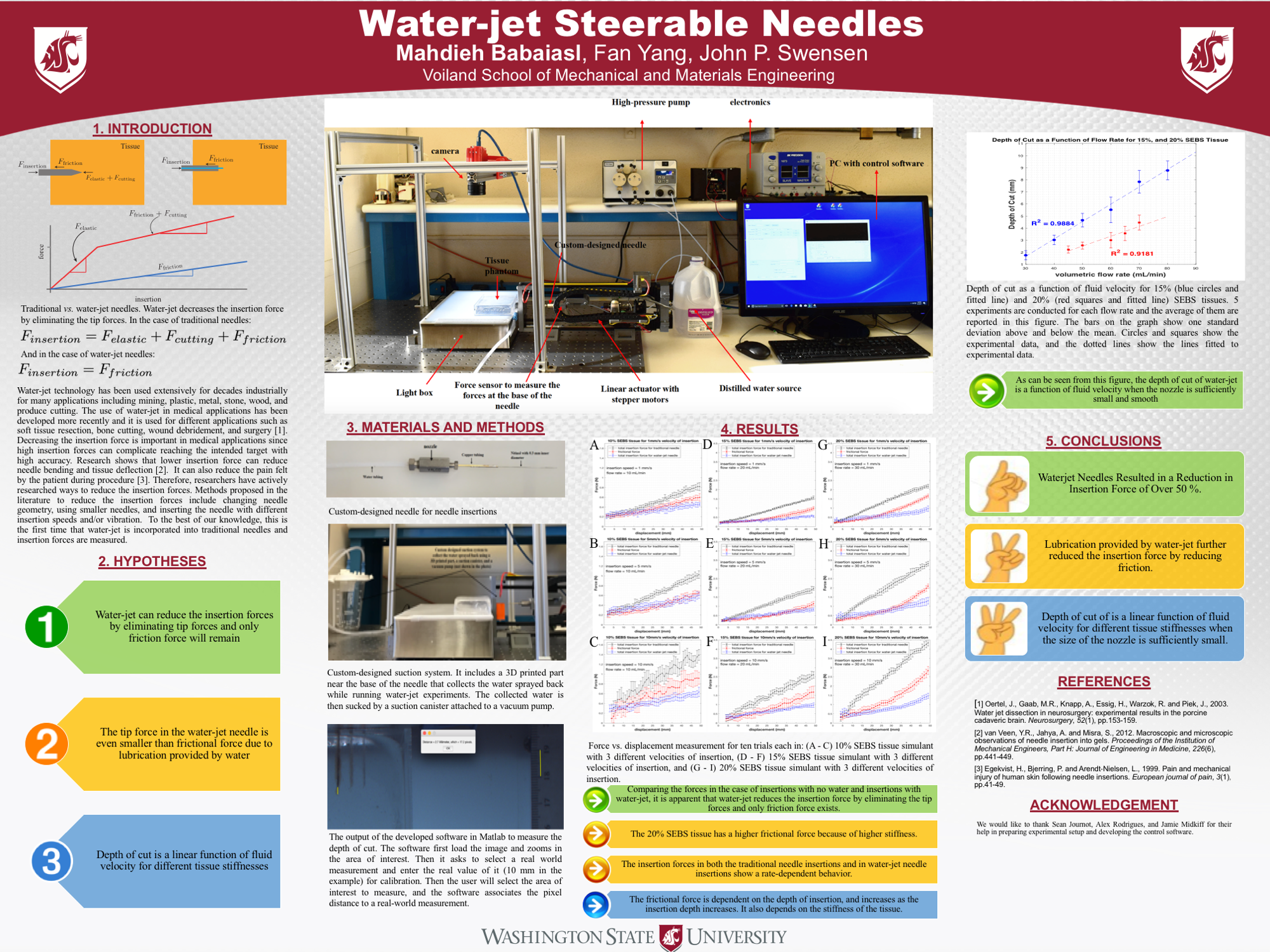
Water-jet technology has been used extensively for decades industrially for many applications including mining, plastic, metal, stone, wood, and produce cutting. The use of water-jet in medical applications has been developed more recently and it is used for different applications such as soft tissue resection, bone cutting, wound debridement, and surgery. In this paper, a new application of water-jet technology in the medical field is proposed, namely water-jet cutting at the tip of a needle with a long-term goal of steerable needles. A needle insertion system is designed and built, which has a custom- designed water-jet nozzle attached to a Nitinol needle as its ”needle”. Insertions with and without water-jet into 10%, 15% and 20% SEBS tissue-mimicking simulants are performed and the associated force data is measured using a force sensor at the base of the needle. The results of force vs. displacement show that the water-jet reduces the insertion force associated with traditional needles by eliminating tip forces. In this paper, a custom-designed straight nozzle is used to show the feasibility of water-jet steerable needles, whereas future work will focus on steerability using steerable nozzles. Depth of cut as a function of fluid velocity is also measured for different volumetric flow rates. The results show that depth of cut is a linear function of fluid velocity when the width of the water-jet nozzle is sufficiently small and smooth.
Steerable needles hold the promise of improving the accuracy of both therapies and biopsies as they are able to steer to a target location around obstructions, correct for disturbances, and account for movement of internal organs. However, their ability to make late-insertion corrections has always been limited by the lower bound on the attainable radius of curvature. This paper presents a new class of steerable needle insertion where the objective is to first control the direction of tissue fracture with an inner stylet and later follow with the hollow needle. This method is shown to be able to achieve radius of curvature as low as 6.9mm across a range of tissue stiffnesses and the radius of curvature is controllable from the lower bound up to a near infinite radius of curvature based on the stylet/needle step size. The approach of “fracture-directed” steerable needles indicates the promise of the technique for providing a tissue-agnostic method of achieving high steerability that can account for variability in tissues during a typical procedure and achieve radii of curvature unattainable through current bevel-tipped techniques. A variety of inner stylet geometries are investigated using tissue phantoms with multiple stiffnesses and discrete-step kinematic models of motion are derived heuristically from the experiments. The key finding presented is that it is the geometry of the stylet and the tuning of the bending stiffnesses of both the stylet and the tube, relative to the stiffness of the tissue, that allow for such small radius of curvature even in very soft tissues.
M3 robotics lab participated in annual 2018 Research Expo held by Washington State University. At this Expo people presented their research and judges graded them based on some rubric such as novelty of research, the quality of presentation, poster format, and the importance of research. 2 researchers will be awarded with scholarship in each category.
Mahdieh Babaiasl presented her research on Waterjet Steerable Needles:
We presented our ongoing research on Water-jet Steerable needles. Water-jet technology has been used in industry for a long time for different applications.
Watch a short video below on cutting soft tissues with waterjet:
In recent years, it has been used in medical applications such as resection of the liver, surgery, and bone cutting. The use of water-jet technology in steerable needles is not studied before and to the best of our knowledge this is the first time that water-jet technology is incorporated in steerable needles.
As a side note, steerable needles are flexible needles that due to their flexibility can be directed to reach to difficult-to-reach places in the body that were unreachable using traditional needles. Decreasing the insertion force is really important in terms of reaching to the desired places precisely, reducing the needle bending, tissue deflection, and the pain felt by the patient. Different researchers tried to do it using different approaches.
Mahdieh Babaiasl is presenting her research to judges.
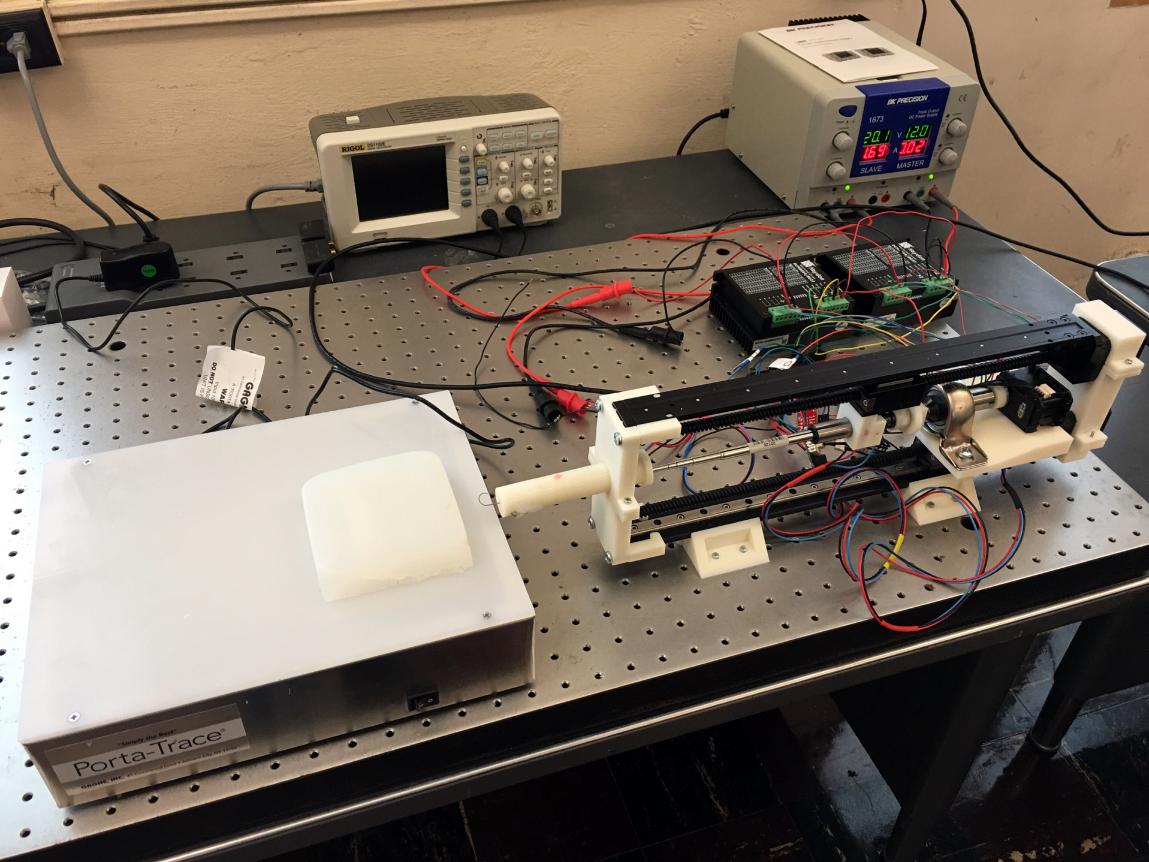
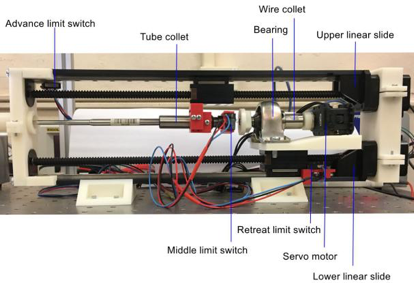
We developed an experimental setup that consists of a linear actuator that drives the custom-designed needle into the tissue, and a force sensor at the base of the needle measures the forces acting on the tip of the needle. 3 different experiments are performed, that are inserting the needle into the tissue without running water-jet (we call this the traditional needles approach), inserting the needle into the same channel without water-jet to measure only frictional forces (because the channel is already cut and there is no cutting forces acting on the tip of the needle), and insertions with running water-jet. Experimental results verified that our hypotheses are right and that water-jet eliminates tip forces and only frictional force remains. The force on the needle is even smaller than the friction in the case of insertions with water-jet due to the lubrication that water provides in the channel.
We also measured the depth of cut of water-jet as a function of fluid velocity, and concluded that when the width of water-jet nozzle is sufficiently small, the depth of cut is a linear function of fluid velocity.
On Jan., 2018, The Daily Evergreen, WSU newspaper, interviewed m3 robotics lab team members on the ongoing research in our lab. Prof. Swesnen talked about a new approach using waterjet, allowing to direct the needle exactly where it wants to go. This method also eliminates resistance, making it easier to press the needle in further. Prof. Swensen also added that our lab is at a point where we’ve proved water-jet steerable needles work. He also talked about other ongoing research in our lab namely fracture-directed steerable needles, and tunably compliant materials.
A journal paper is going to be published, it presents a new needle insertion system which consist of preshaped nitinol needles and tubes. Also, it will introduce a method about how to control the insertion curvature inside tissue.