Talk on Soft Robotics: Materials, Geometry, and Medical Applications
mahdieh.babaiasl

Heon’s paper entitled “Design and experimentation of a tunably-compliant robotic finger using low melting point metals” is accepted at the ASME 2016 Conference on Smart Materials, Adaptive Structures and Intelligent Systems (SMASIS 2016) held on September 28-30, 2016, Stowe, VT, USA.
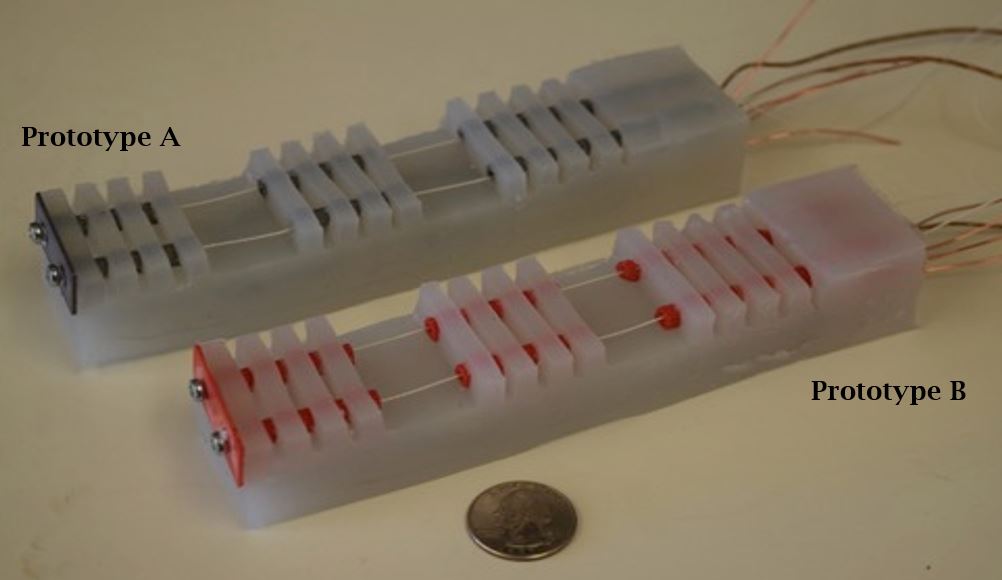
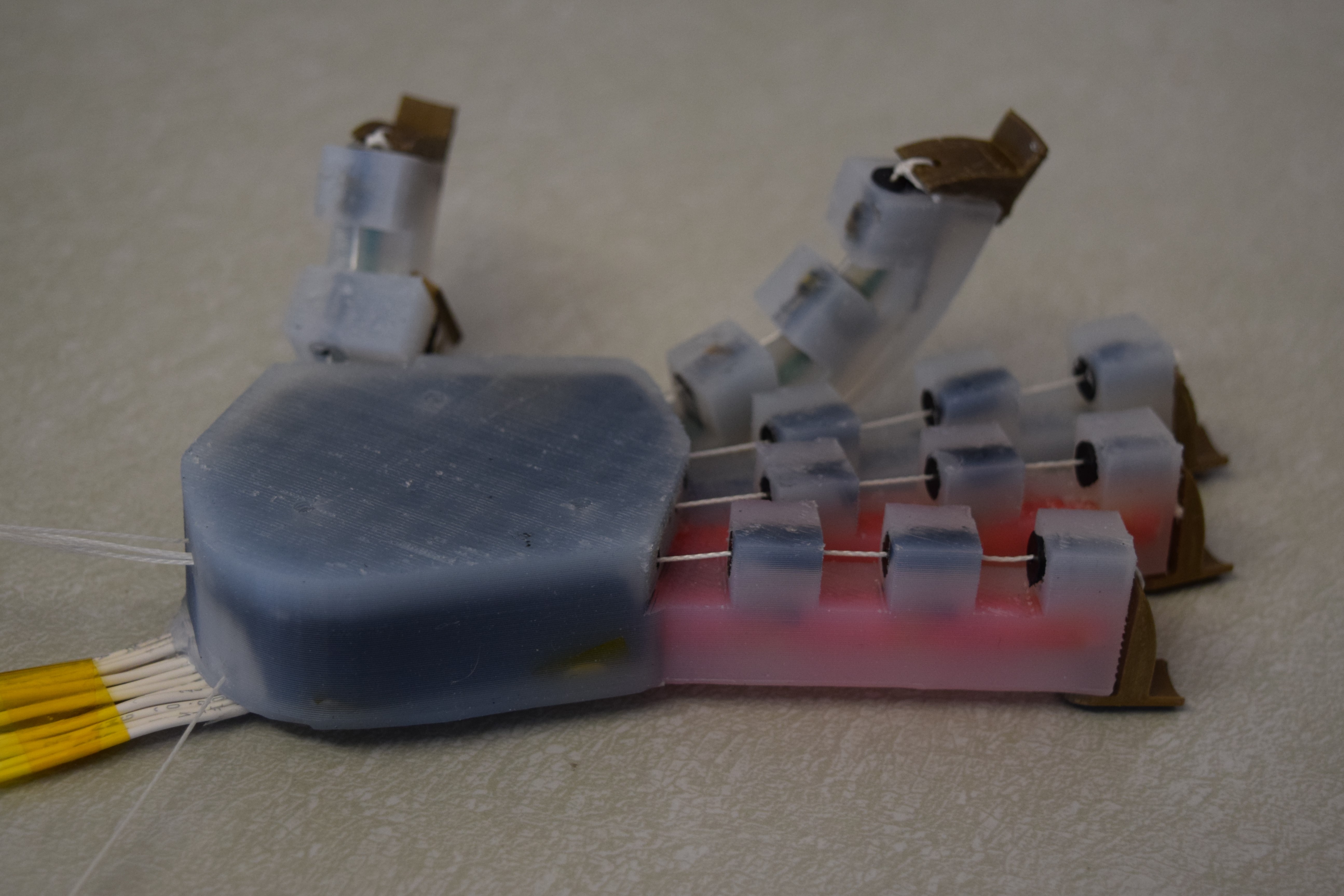
Hi paper is about fabrication and testing of a tunably-compliant tendon-driven finger implemented through the geometric design of a skeleton made of the low-melting point Field’s metal encased in a silicone rubber. The initial prototype consists of a skeleton comprised of two rods of the metal, with heating elements in thermal contact with the metal at various points along its length, embedded in an elastomer. The inputs to the systems are both the force exerted on the tendon to bend the finger and the heat introduced to liquefy the metal locally or globally along the length of the finger. Selective localized heating allows multiple joints to be created along the length of the finger.

Fabrication of the project was accomplished via a multiple step process of elastomer casting and liquid metal casting. Heating elements such as power resistors or Ni-Cr wire with electric connections were added as an intermediate step before the final elastomer casting. The addition of a tradition tendon actuation was inserted after all casting steps had been completed. While preliminary, this combination of selective heating and engineered geometry of the low-melting point skeletal structure will allow for further investigation into the skeletal geometry and its effects on local and global changes in device stiffness.