Robotics and Automation Lab
Haptic Gloves
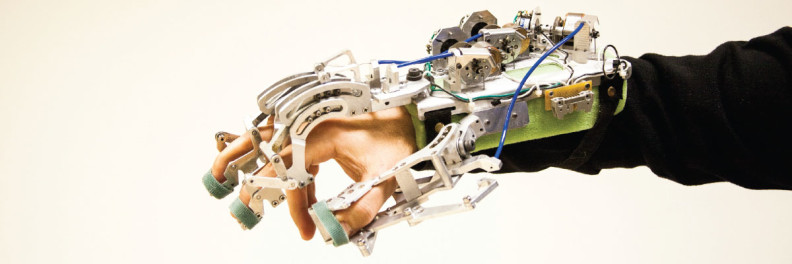
One form of haptic interface is a glove that can provide a sense of touch and/or interaction forces to the user’s fingers. As the user holds a virtual object in a simulated world, the glove can restrict finger movements to provide the sensation of holding an object.
In the future, such a glove might be worn to “hold” a virtual shirt on an online shopping website and “feel” the texture of its fabric.
Please click the links on the left to explore some of our research work in developing haptic gloves.